中国运载火箭技术研究院北京精密机电控制设备研究所自主研发的“一种仿人机械臂示教控制方法”获国家发明专利。 一般来说,操作机器人时,需要使用示教器对机器人进行示教、做信号配置等,进而让机器人自动执行动作。传统工业机器人主要是通过示教盒或者通过在机器人末端安装力传感器,然后拖动机器人末端来执行动作。但是通过示教盒实现示教的过程比较复杂,并且不能达到系统的要求;通过在末端安装力传感器拖动示教,又增加了系统的成本。 该方法简化了机械臂示教过程,同时还降低了机械臂示教成本。
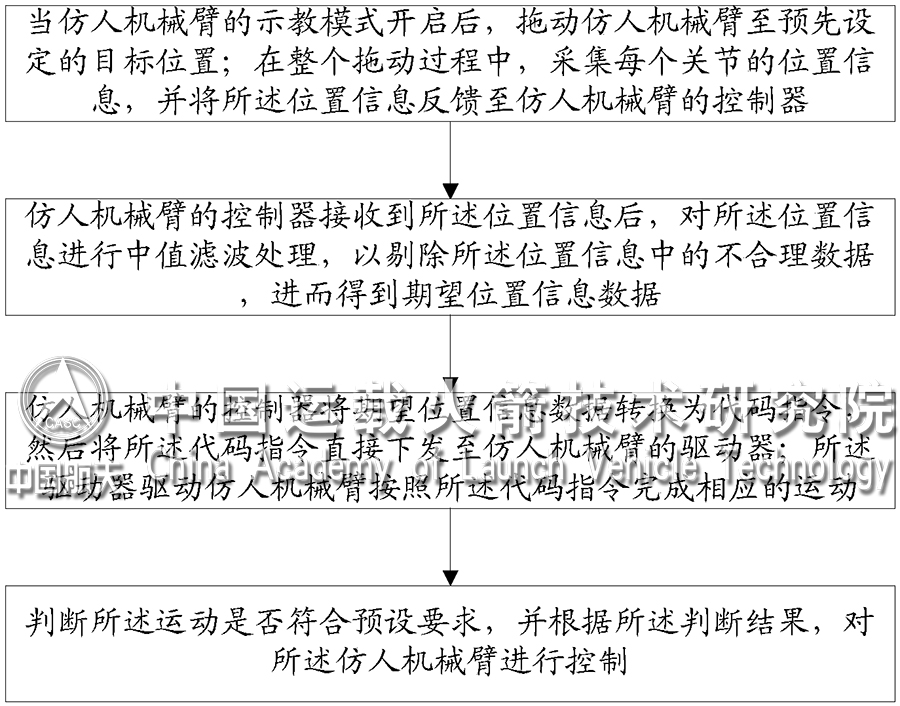
△示意图










网友评论
文明上网理性发言,请遵守新闻评论服务协议