“一种单电机驱动的双螺纹欠驱动多指机器人末端执行器及方法”获国家发明专利
发布时间 : 2019-09-24
来源 : 中国运载火箭技术研究院新闻中心
中国运载火箭技术研究院北京精密机电控制设备研究所自主研制的“一种单电机驱动的双螺纹欠驱动多指机器人末端执行器及方法”获国家发明专利。
机器人末端执行器安装在机器人的末端法兰上,通过电驱动或气动方式实现简单的抓取动作,且范围固定,只能抓取固定尺寸的物体。当需要抓取更大或者更小的物体时,就需要更换其他规格的机器人末端执行器。
本发明克服现有技术的不足,解决了机器人末端执行器需要抓取形状变化物体时,需要更换不同规格的末端执行器的问题。
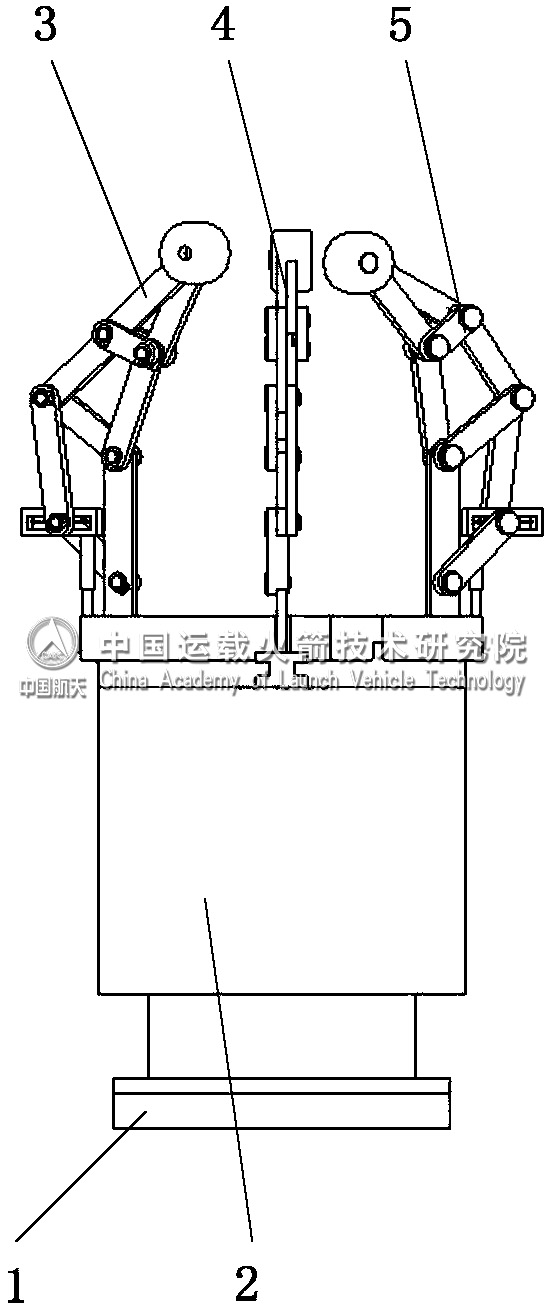
△末端执行器整体视图


网友评论
文明上网理性发言,请遵守新闻评论服务协议